Materiali e strumenti:
Colla a caldo
Filo interdentale
Agganci stampati in 3d
Mano stampata in 3d
Driver servomotori
Arduino uno
Cavi
un computer con l’IDE di Arduino installato
Alimentatore (va impostato a 5V)
Pennarello indelebile
Costruzione:

Ritaglia il foam tracciando il contorno della mano di plastica.
Cerca di sprecarne il meno possibile tracciando il profilo vicino ai margini del foglio.

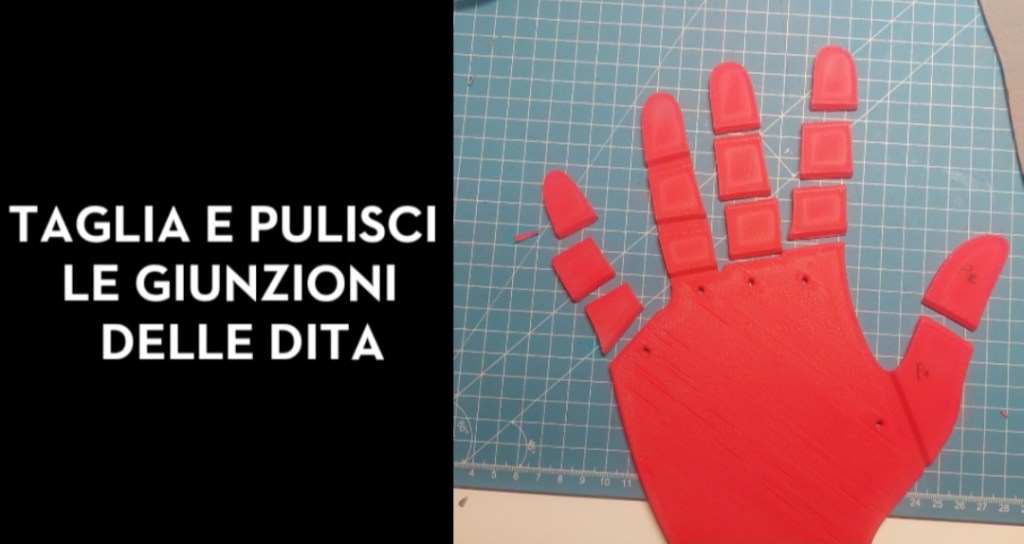
Spezza le dita e pulisci le giunzioni tra i vari pezzi.


Ritaglia con la forma delle falangi la plastica flessibile (lascia circa un centimetro di plastica che poi andrà attaccata sul palmo). Incollaci i pezzi delle dita distanziati di circa 2mm.


Fora il foam con un cacciavite o una penna in corrispondenza dei fori sul palmo di plastica. Utilizza una pinza fustellatrice (quella per fare i buchi alle cinture) per allargare il foro (in alternativa si può usare un cutter).

E’ importante che lo scotch sia in tensione per riportare il dito nella posizione distesa. Taglialo a metà e incolla le due strisce ai lati dei fori.

Incolla con la colla a caldo i vari agganci (tranne quelli che andranno in punta sull’ultima falange). Fai in modo che i fori siano allineati con i fori posizionati sul palmo della mano.


Taglia il filo interdentale in modo che arrivi dalla punta delle varie dita fino a circa la fine del palmo.



Parte elettronica.
Introduzione al servomotore:
Per controllare le varie dita della mano utilizzeremo dei servomotori, dei motori in grado di ruotare da 0 a 180 gradi in modo preciso. Questo grado di rotazione può essere controllato applicando l’impulso elettrico di lunghezza appropriata al suo pin di controllo. L’impulso di larghezza di 1 ms (1 millisecondo) ruota il servo a 0 gradi, 1,5 ms ruota a 90 gradi (posizione neutra) e l’impulso di 2 ms può ruotarlo a 180 gradi.

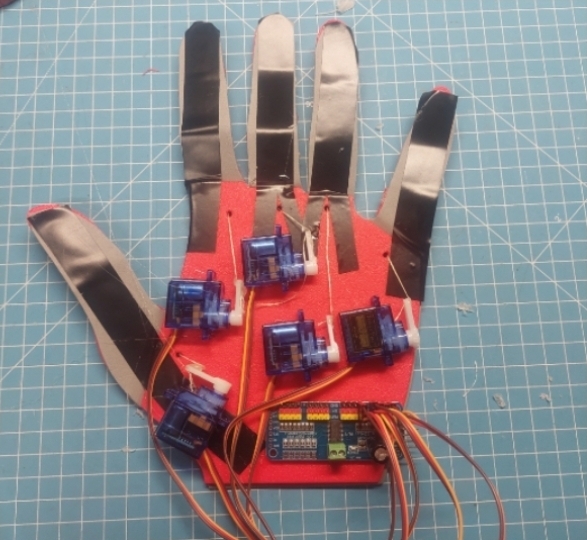
Il braccino del servomotore è legato al cavo che percorre tutto il dito. Quando il servomotore ruota, il cavo viene messo in tensione facendo contrarre il dito. In totale la mano ha 5 servomotori, e ognuno di essi può essere controllato singolarmente.
Cablaggio dei componenti:
Numera con un pennarello le varie dita e collega i servomotori corrispondenti al driver dei motori, ( 0 corrisponde alla connessione più a sinistra).

Connetti il pin SDA del driver al pin 4 di Arduino, il pin SCL al pin 5 , il pin VCC al 5V e il GND al GND.
Accendi L’alimentatore e impostalo a 5V.
Sul driver è presente un morsetto blu per l’alimentazione dei servomotori, connetti V+ al cavo rosso e il GND al cavo nero dell’alimentatore.
Scarica il codice e aprilo con l’IDE di Arduino.
https://drive.google.com/file/d/1q-6Yb4CyM5zxve3DopKltBmPT07-N9Qn/view?usp=sharing
per installare la libereria:
Seleziona nel menu in alto la scheda “Arduino uno” e seleziona la porta COM di Arduino.
Carica lo sketch.
Spiegazione del codice:
All’inizio del codice vengono incluse le librerie “Wire” e “Adafruitservodriver” per utilizzare il driver dei servomotori e il protocollo di comunicazione I2C.
Nella funzione “void setup()” viene inizializzato il driver con la funzione “pwm.begin();” e anche il monitor seriale (Serial.begin(9600);) . Poi viene impostata la frequenza di trasmissione al driver a 60 HZ.
Questa parte di codice viene eseguita una sola volta all’avvio del programma.
Nella funzione “void loop()” ci sono i comandi che verranno eseguiti all’infinito durante l’esecuzione del programma. Qui vengono inizializzate le variabili “angle” e “pulse”. Inserendo un valore tra 0 e 180 nella variabile angle, la variabile “pulse” conterrà il valore equivalente all impulso grazie al comando “map”, che convertirà il numero contenuto nella variabile “angle” nel rispettivo impulso comprensibile al driver. Successivamente con la funzione pwm.write(0,0,pulse); viene fatto ruotare il servomotore “0” connesso alla scheda “0” (volendo è possibile inserire più driver quindi è necessario specificare la scheda) del valore “pulse”.
Modificando il numero del servomotore e la variabile “angle” è possibile far muovere tutti i servomotori. Se si vuole far muovere i servomotori con angoli diversi è necessario inserire più variabili “angle” e nuovi “pulse”.


Scrivi una risposta a Maker Faire Roma 2025: Laboratorio di Robotica Creativa – IL PAVONE Cancella risposta