Per iniziare mi presento: mi chiamo Marco Michelini, frequento la terza superiore e sono appassionato di robotica. In questi articoli dedicati al mio ultimo progetto documenterò le varie fasi di progettazione e realizzazione di R2D2.
Iniziamo!

Tutto è cominciato sei mesi fa, quando ho partecipato ad una gara di robotica a Firenze. Avevo costruito per l’evento una piccola stazione meteorologica portatile, dal design ispirato ad un dispositivo di “Star Trek” chiamato Tricorder.

Non ho vinto e ho deciso di iniziare subito a costruire R2D2,il famoso robot di Star Wars, per la gara “Scienze a Firenze” dell’anno prossimo.
Perché ho scelto R2? La motivazione è legata all’esigenza di trovare per i sensori un involucro bello e funzionale; R2 ha molti vantaggi: è un “barattolo gigante” , è molto spazioso ed è anche simpatico e famoso!
un video che racchiude le scene più famose di R2 tratte dai film.
Come realizzarlo?
La tecnologia chiave per questo progetto è la stampa 3d.
In prima superiore ho partecipato a un corso sulla modellazione 3d dove ho imparato ad usare i vari programmi di disegno e lo slicer (quest’ultimo serve per rendere i disegni 3d comprensibili alla stampante).
A proposito, a Gennaio 2024 verrà avviato a scuola un corso proprio sulla stampa 3d, vi suggerisco di prenderlo in considerazione.
Tornando a R2, per costruirlo nel periodo estivo non potevo fare affidamento sulla stampante della scuola, pertanto ho acquistato una stampante danneggiata che poi ho riparato.
Il primo problema che ho riscontrato nella realizzazione di R2 è stata la grandezza. La versione originale è alta un metro, quindi è troppo ingombrante per il mio scopo. Per ovviare al problema, ho deciso di stampare il robot con una scala del 60% elaborando dei disegni reperiti in rete. Dopo 6 mesi posso dire di aver quasi terminato il lavoro. E’ stata una bella sfida perché, avendo una stampante piccola, l’ho dovuto stampare in tante piccole porzioni. I disegni sono stati anche modificati per aggiungere dettagli come alloggiamenti per viti o superfici di incollaggio.


La seconda sfida, che sto affrontando ora, è la progettazione dei meccanismi interni e delle articolazioni delle parti mobili. I meccanismi permetteranno alla testa di girare e ad R2 di muoversi e trasformarsi.
Infatti R2D2 può assumere due posizioni: da fermo resta su due piedi, mentre per muoversi fa uscire un terzo piede che gli permette di non ribaltarsi.
R2 D2 gets death star plans ecco una clip dove si vede la trasformazione da 2 piedi a 3.

Se vi chiedete come hanno fatto i produttori di Star Wars a costruire il meccanismo di trasformazione la risposta è che non si sono posti il problema. Hanno preso un attore affetto da nanismo , Kenny Baker, e l’hanno inserito dentro il robot.

Per tornare al mio lavoro, il sistema per far ruotare la testa è stato il più veloce da realizzare. Ho trovato il centro del cilindro e ho disegnato dei bracci per bloccare il motore con l’asse coincidente al centro della base cilindrica.
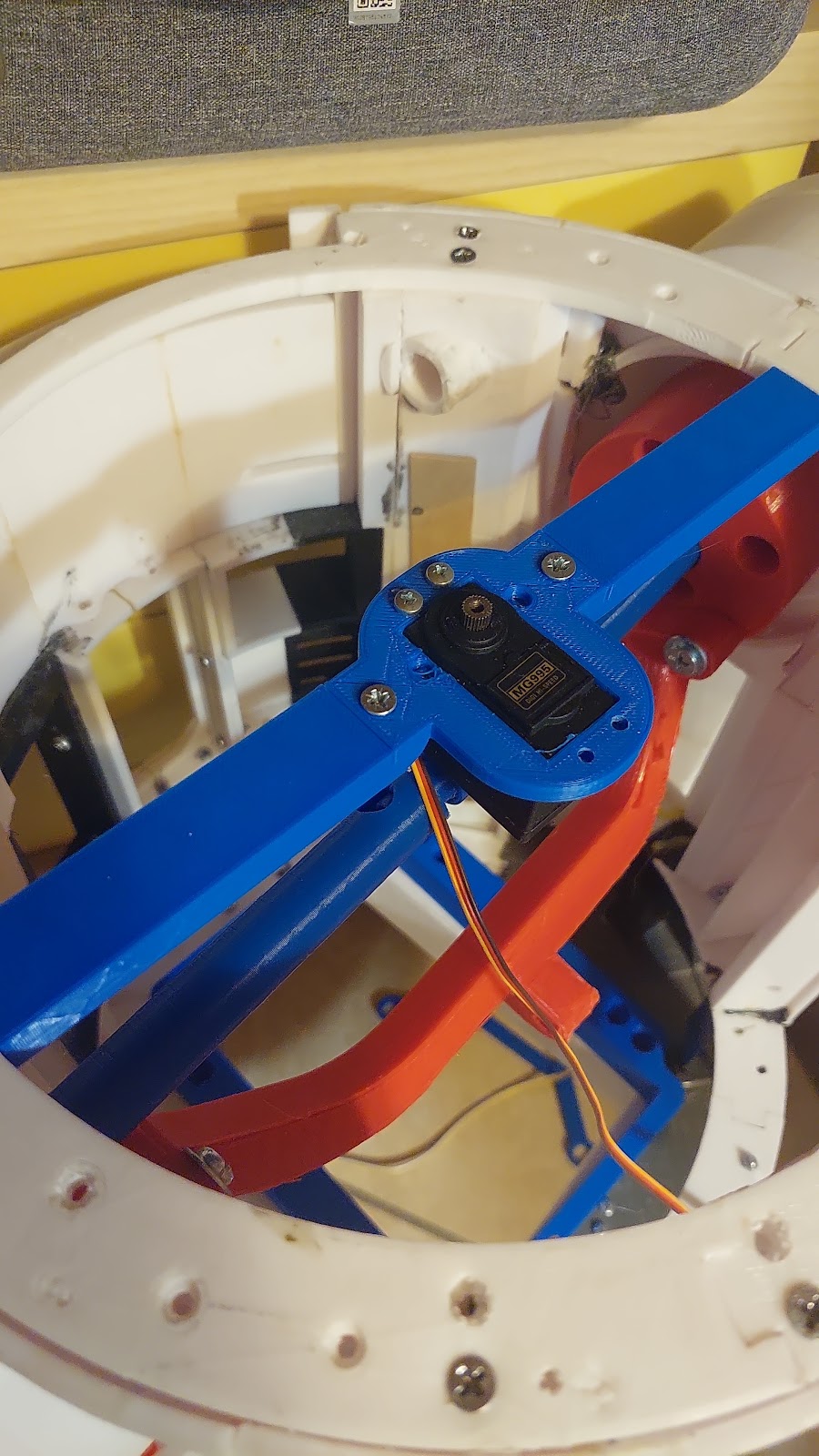
Poi ho progettato la base della testa con l’aggancio del motore centrale e l’ho vincolato verso l’alto con una vite in modo che potesse solo ruotare e non sfilarsi. In questo modo svitando la vite è possibile staccare la testa per effettuare riparazioni dentro al corpo.

Vista da dentro il corpo
Diversi problemi sono sorti realizzando il meccanismo di trasformazione: infatti quel movimento coinvolge contemporaneamente 3 articolazioni: le gambe devono inclinarsi insieme ai piedi e il terzo piede deve posizionarsi sul terreno.
- Nelle gambe ho costruito un aggancio per i motori e sembrano ruotare senza problemi; la parte più difficile da realizzare sono i piedi: essi devono restare bloccati per vincolare la gamba quando il robot è su due piedi e inclinarsi quando passa a 3.


Primo prototipo per inclinare i piedi
Sappiamo dalla fisica che il momento è uguale a forza per braccio (provate a spingere una porta dalla maniglia e poi vicino alla cerniera: si nota che più si è lontani dal fulcro minore forza bisogna applicare.)
Quindi nei miei prototipi ho provato ad utilizzare una ruota dentata e una cremagliera lontana dal fulcro collegata a un sistema di tubi, per portare una spinta maggiore al piede e muoverlo.
Il motore si è rivelato non sufficientemente potente per lo scopo. Ho provato a sostituirlo con un motore “passo passo” (utilizzato nelle stampanti 3d per la loro forza e precisione,) ma non è bastato.
Navigando su internet, in cerca di spunti, mi sono imbattuto in un video di un ingegnere americano che aveva un problema simile e che aveva risolto allungando il braccio. Ho tentato quindi di raddoppiare il braccio ma per fare ciò ho dovuto spostare il motore dentro al corpo riprogettando le gambe e i meccanismi interni per adattarli alla struttura del mio robot. Adesso il problema sembra risolto.

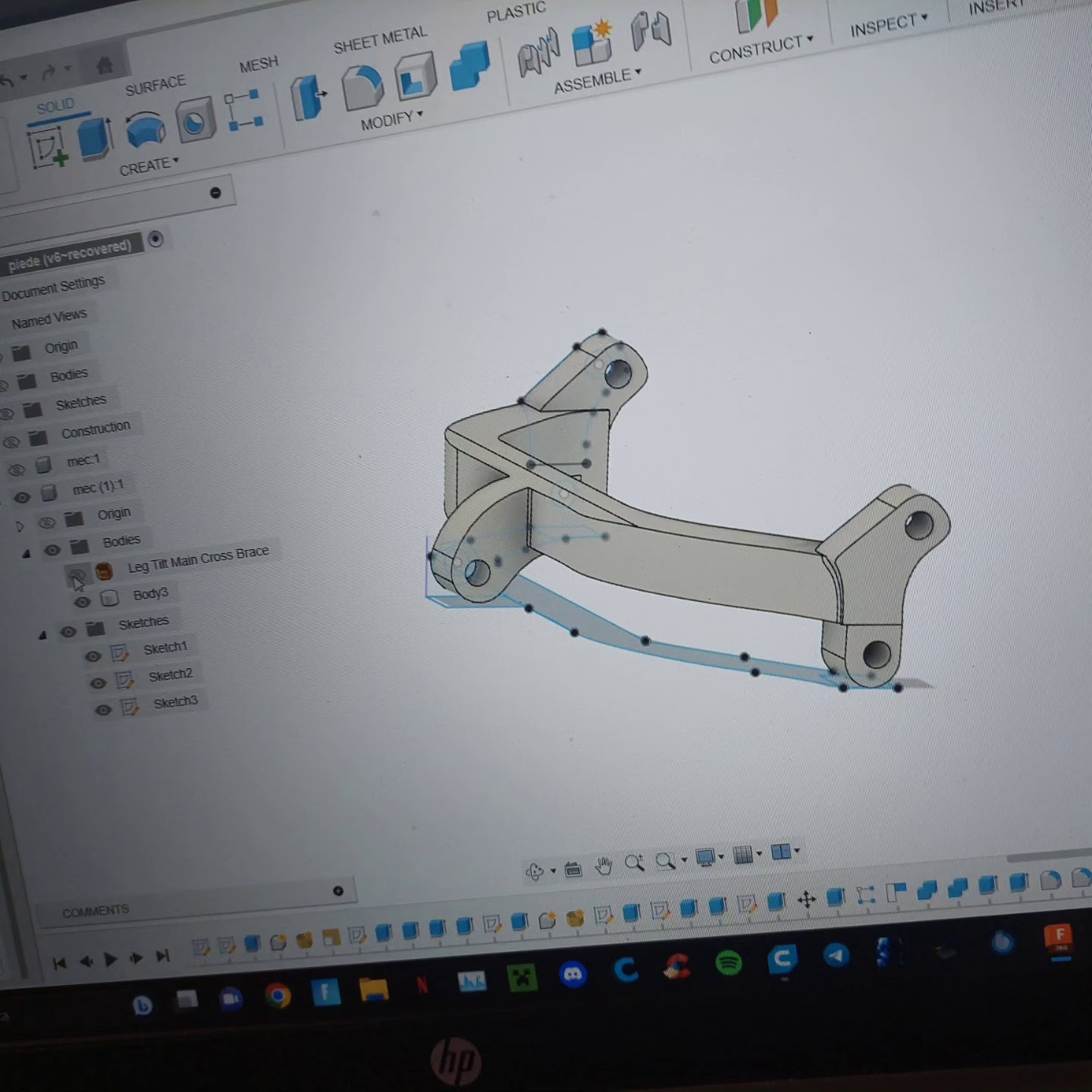
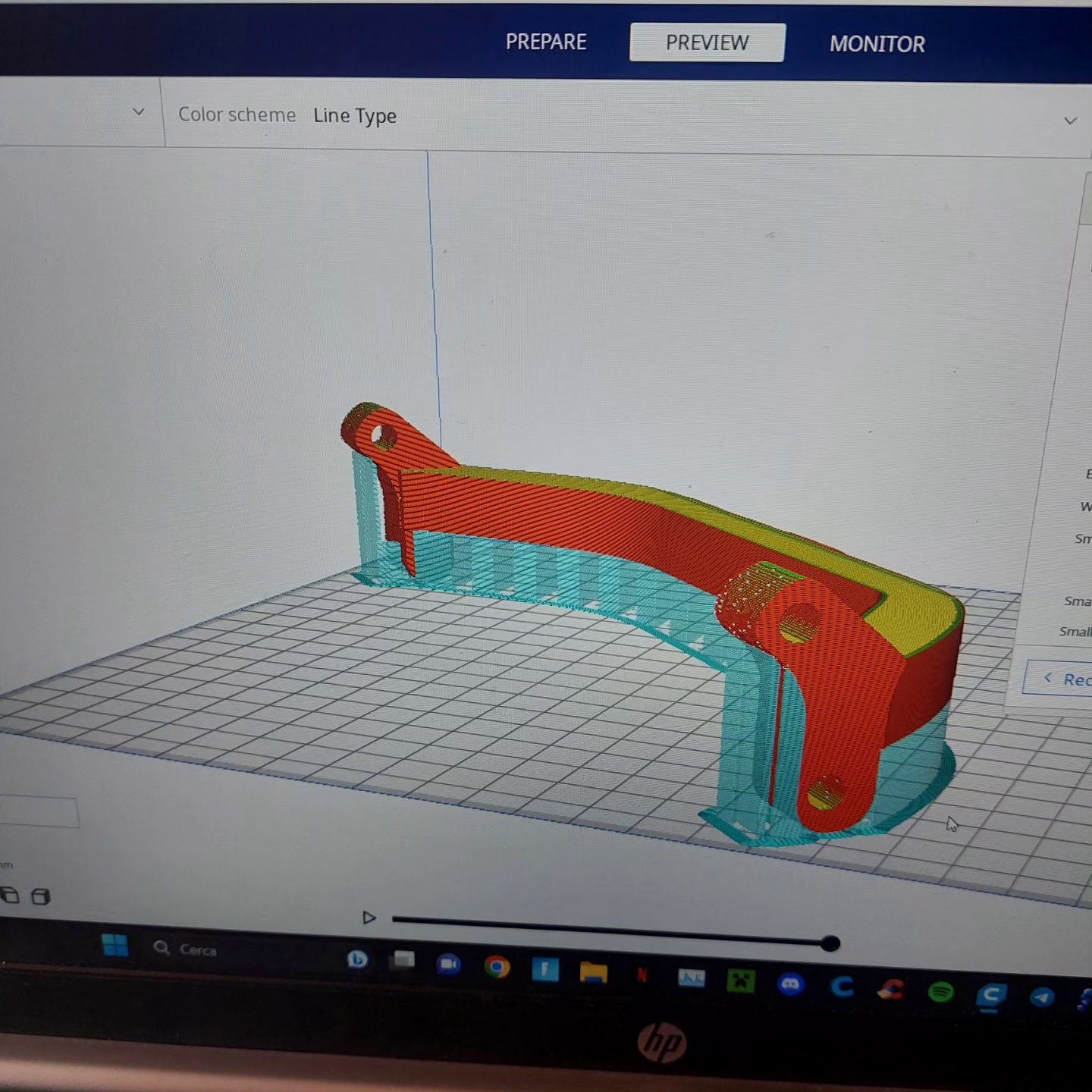
Alcuni disegni che ho realizzato con Fusion 360 ed elaborati con Cura
Nei prossimi articoli parleremo del sistema di propulsione, lo sviluppo dell’app di controllo, il sistema di alimentazione e tanto altro ancora.
Alla prossima!
Ho creato un profilo instagram dove raccolgo tutta la documentazione del progetto
https://instagram.com/marckcreator?igshid=OGQ5ZDc2ODk2ZA==i



Scrivi una risposta a Costruire una Delorean: Progetto Ritorno al Futuro – IL PAVONE Cancella risposta